變頻共振海浪發電
鄭克安
海浪的能源密度遠大於風力或太陽能,這個特性好比刃之兩面,海浪同時也具有強大破壞力及腐蝕性。目前海浪發電在實用方面存在一些瓶頸:
1.效益低無法與傳統電網競爭
2.因為效益低導致結構大投資大,不適於零星地形如海島或偏遠地區應用
3.不耐腐蝕及海浪拍打,生命期短
4.佔用海岸線,土地取得不易
5.風暴存活率小影響投資意願。
由於以上諸多原因導致海浪發電目前不普及,假如這些瓶頸可以克服,那麼全球有許多島嶼及電網不及的地區會有需求,這個市場深具潛力。 。
傳統海浪發電效益低,因為動力部件無法與海浪週期取得相位合拍形成強迫共振(forced resonance)。海浪週期從 0.25 到 25 秒隨風速及環境而變化,用傳統工藝(無智慧控制)設計的海浪發電系統無法自動變頻與變化多端的海浪取得共振。海浪的能量在動能與位能之間互換,只有當海浪具有最高動能時與系統的動力部件發生彈性碰撞,才能得到動能傳遞的最高效益,這個用來驅動發電機的動能正是發電效益的關鍵。所以,一個能夠智慧變頻並與入侵海浪取得相位合拍造成強迫共振的發電系統,是高效海浪發電的必要條件。
實用的海浪發電設計須要滿足幾個充要條件,即:
1.一個智慧變頻系統可以主動與海浪取得共振得到最佳動能傳遞效益
2.系統與海水隔絕防止海水腐蝕
3. 能夠在風暴中自保存活
4. 不佔用海岸線陸地
5. 系統可以剪裁,可以單機做小功率應用,也可以多機聯網建立海浪發電場
6. 可以量產裝船外銷全球
由於近代多個關鍵技術如微電腦、電子陀螺、光電感應器、超級電容、鋰電池、高功率半導體開關與電腦模擬軟體的成熟,利用海浪對智慧調頻的發電系統進行強迫共振發電成為可能。 。
設計主旨
當海浪從深海運動到淺水區,波浪從上下運動被海床擠壓後成為前滾運動,浮體受到滾動海浪沖擊會產生上下及橫向搖晃。船舶設計把浮力中心安排在重心的上方,確保浮力可以在任何重心傾斜的情況下把船身拉回穩定狀態。 不同於船舶,海浪發電系統像不倒翁,擺錘(動力部件)希望浮體受到沖擊時產生大幅搖擺,從而取得動能,這個動能之後可以轉變成電力。
本海浪發電系統適用於離海岸線外 500 公尺至一公里左右,水深大約十至三十公尺的淺水區。其結構包括浮體、擺錘、發電機、控制電路、氣室等,見圖 1、2(以下作圖僅供理論參考,實體形狀參數等由 3D 電腦模擬最佳化取得)。
.png)
發電系統安裝在密封浮體(F)內,主軸(A)固定在浮體上,而且位置被安排在浮力中心(B)的上方。擺錘(E)經由軸副(V)懸掛在主軸(A)上,輸出齒輪(U)附於擺錘(E)上,擺錘的力矩經由齒輪(U)對永磁馬達(M)做功發電。氣室(G)確保浮體不致翻覆,同時氣室(G)的頂端有放氣閥,當系統遭遇風暴時可以下沈海床自保,風暴過後再充氣上浮。本地電池(N)及功率電阻(P)用於儲存或消耗過剩電力,當主電纜飽和或系統維修時,所發電力可以轉接到電阻(P)發熱耗散到海中,保證聯繫電纜不帶電確保人員安全。
● 圖3當浮體遇到前滾海浪沖擊時浮力中心受到前向Wfd及上浮Wup兩股衝力向量,這時候浮力中心(B)對主軸(A)產生一個甩動向量(T),如果擺錘(E)是靜止或向(R)方向擺動,則向量(T)會對擺錘(E)做R方向加速,但如果當時擺錘(E)正做S方向擺動則向量(T)會對擺錘(E)做減速,擺錘(E)減速會降低發電效益而且承軸(V)也將承受額外應力。
● 圖4的擺錘位置使向量(T)對擺錘(E)在R方向同樣加速但加速距離比圖3更長,擺錘(E)得到更多動量
● 圖5則相反,加速效應不如圖3
● 圖6幾乎對擺錘(E)沒有加速效應。
● 圖3,4,5,6用來分析擺錘(E)在不同相位不同方向受到前滾海浪沖擊時對擺錘(E)的直接加速效應,3D電腦模擬可以分析擺錘(E)在全方位不同受力及加速狀態。
.png)
.png)
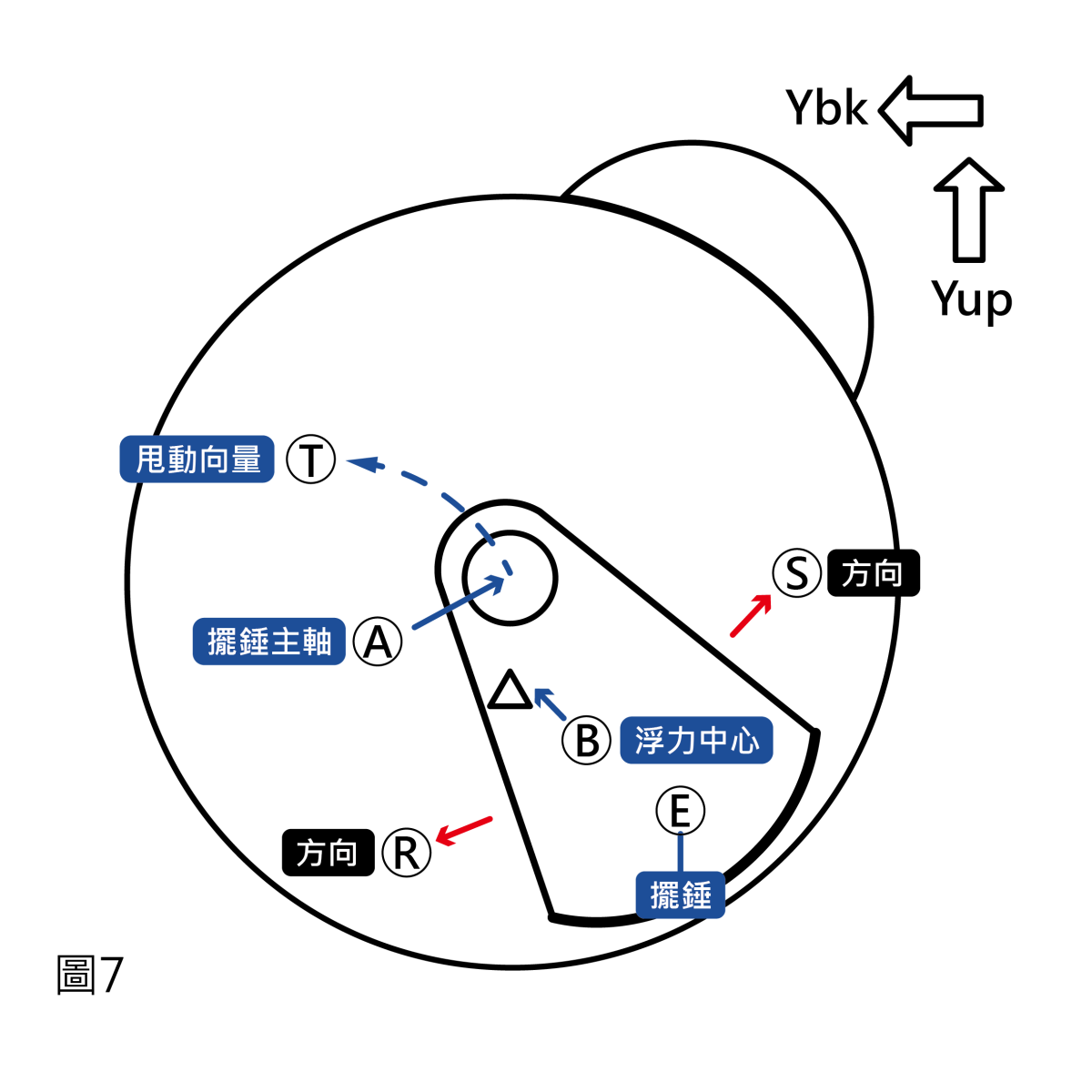
海浪衝擊浮體及擺錘的組合體形成強迫共振的外力源,而浮體與擺錘之間的力距偶合也形成了一個雙振子的共振系統。圖3、4、5、6僅只分析了海浪經由浮體對擺錘產生的直接加速效應,但浮體與擺錘之間也會產生共振,圖7分析浮體遭海浪沖擊後因浮力而產生的上浮向量Yup,回擺向量Ybk以及這兩個向量經由主軸(A)對擺錘(E)產生的甩動向量(T)。
浮體比擺錘重而且體積大許多倍,由浮體餘振對擺錘所產生的加速跟海浪直接對擺錘的加速對擺錘吸取動能同樣重要。浮體的擺動週期比擺錘長而海浪的平均週期比浮體更長,海浪沖擊過後擺錘繼續從浮體的餘振中吸取動能。
永磁馬達(發電機)的輸出電流對擺錘是一個等效阻尼,對擺錘來說這個欠阻尼(underdamping)會降低擺錘速度及擺幅。本設計的主旨就是利用控制馬達的輸出電流來調制擺錘與浮體週期,進而使二者與進襲海浪週期合拍取得最大動能傳遞。
控制電路使用電子陀螺偵測出1.海浪週期、2.浮體週期與相位,另外也從主軸的解碼器偵測到擺錘的相位及運動方向。控制電路使用這些參數可以由對照表(look up table)中找出應對的輸出電流。擺錘與浮體對進襲海浪的相對運動相當複雜,3D電腦模擬在研發過程中產生出最佳效益的理論對照表,但實際應用時因為環境地形裝備架設等等差異會導致參數變化。
控制電路應該是一個經驗系統,軟體可以學習現場狀況自行修改參數建立客製的最佳效益對照表,過往船隻或其他因素也會產生干擾破壞已經建立的共振節拍,等到干擾過去之後軟體會從新自行找回共振。
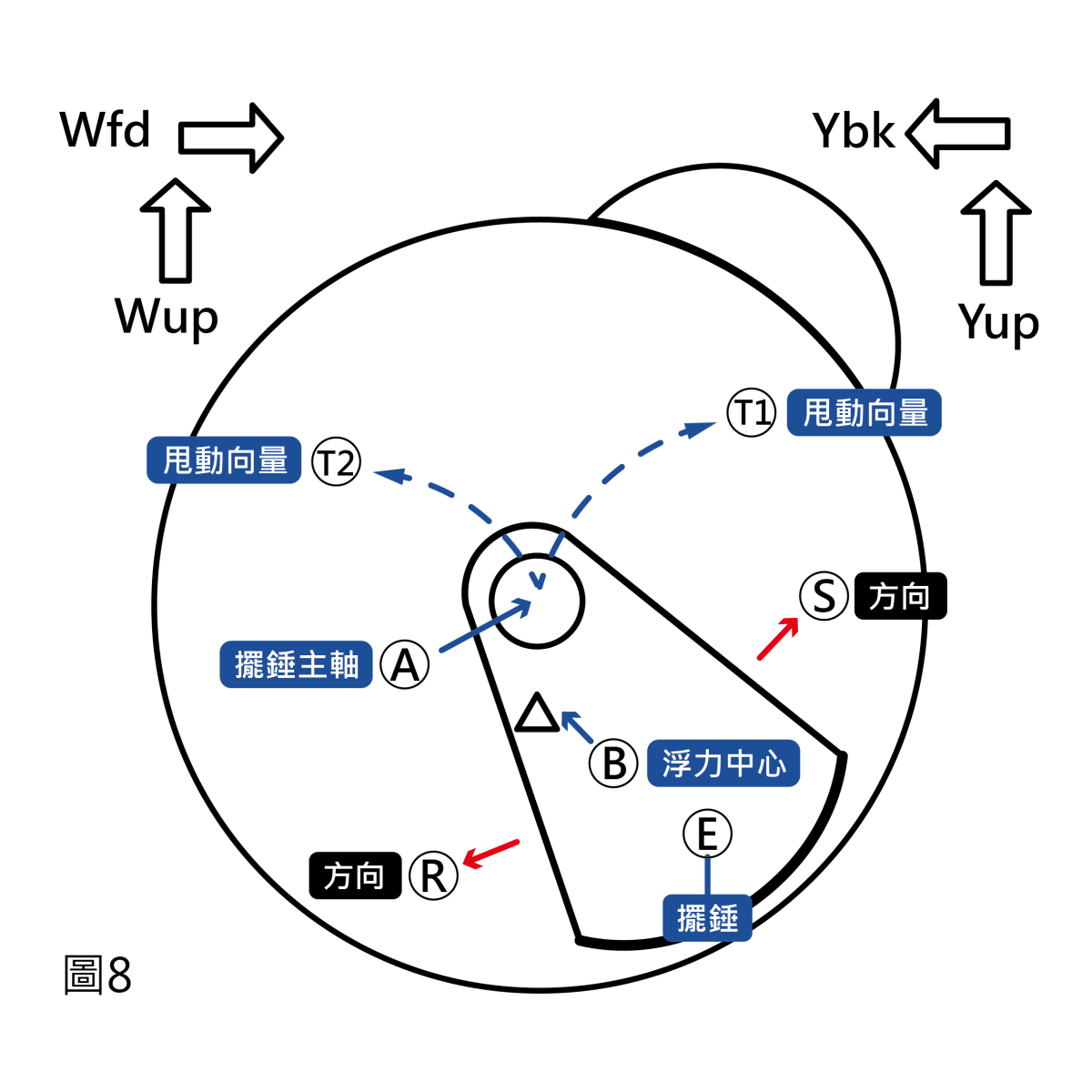
有以上設計都是為了防止進襲海浪對浮體餘振產生對面衝擊的狀況[圖8],這個狀況非但使 T1 與 T2 兩股向量互相抵消,破壞已經建立的擺錘動能,而且承軸副會受到額外應力影響其壽命。圖8 也解釋了共振合拍對海浪發電的重要性。
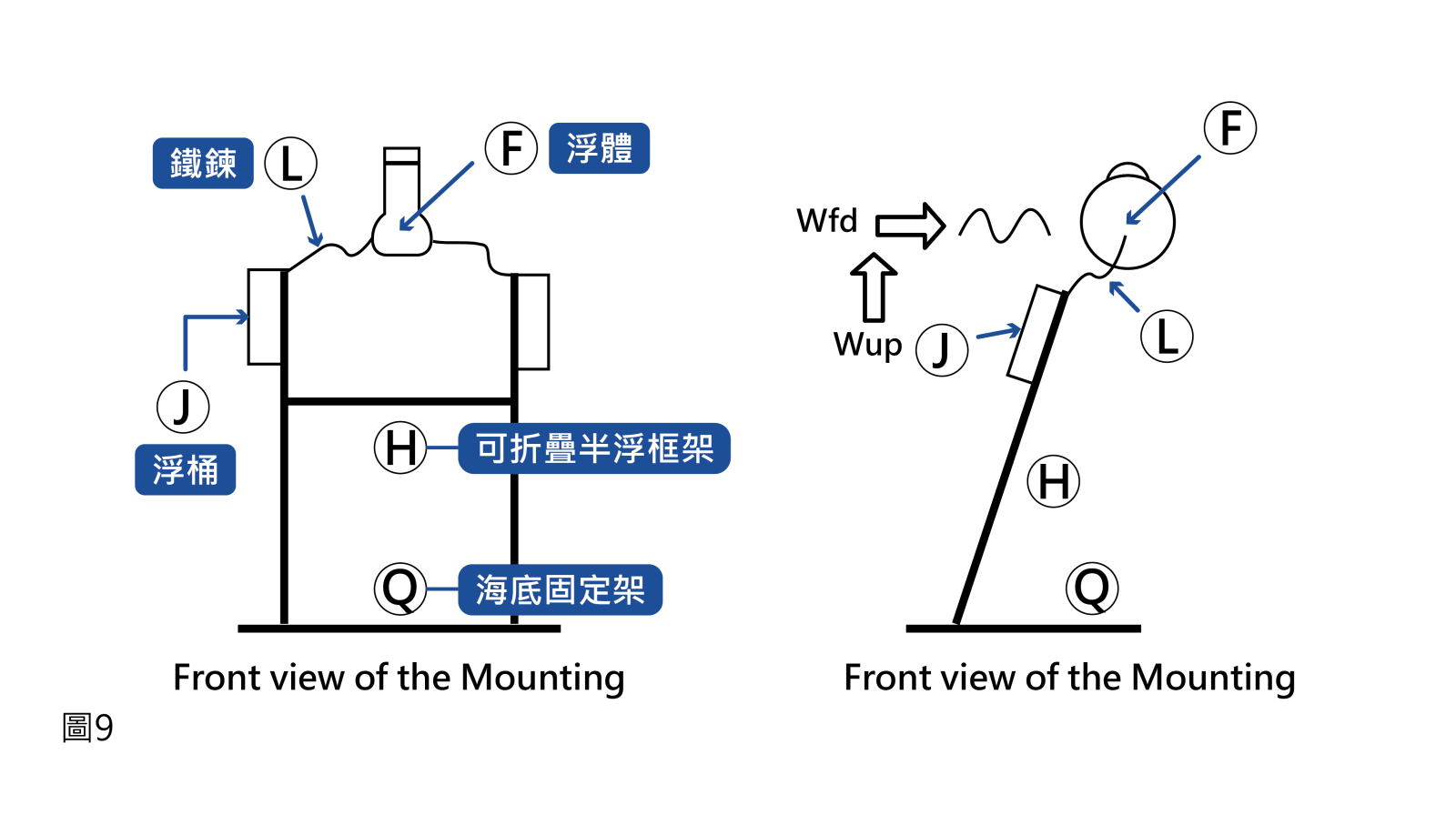
大型海浪發電場由眾多發電單元組成,每一個單元用直流電以 PWM 能量脈波形式經由「或閘門」(OR gate)上傳至主電纜,主電纜上岸後以儲能變電站形式向電網(grid)上傳電力。海浪發電單元用鐵鏈經由框架固定在海床上,鐵鏈給予潮汐升降的自由度。圖9 解釋可折疊半浮框架(H)、鐵鏈(L)、浮桶(J)與海底固定架(Q)的關係:框架防止發電單元橫向漂流,鐵鏈聯結發電單元也給予前後浮動空間,框架下端經轉軸與固定架固定在海床上。預估每個單元發電峰值在一萬到三萬瓦依海況而定。電纜除了輸送電力以外,也作為資訊傳輸,供岸上控制室與各單元通訊與控制用。
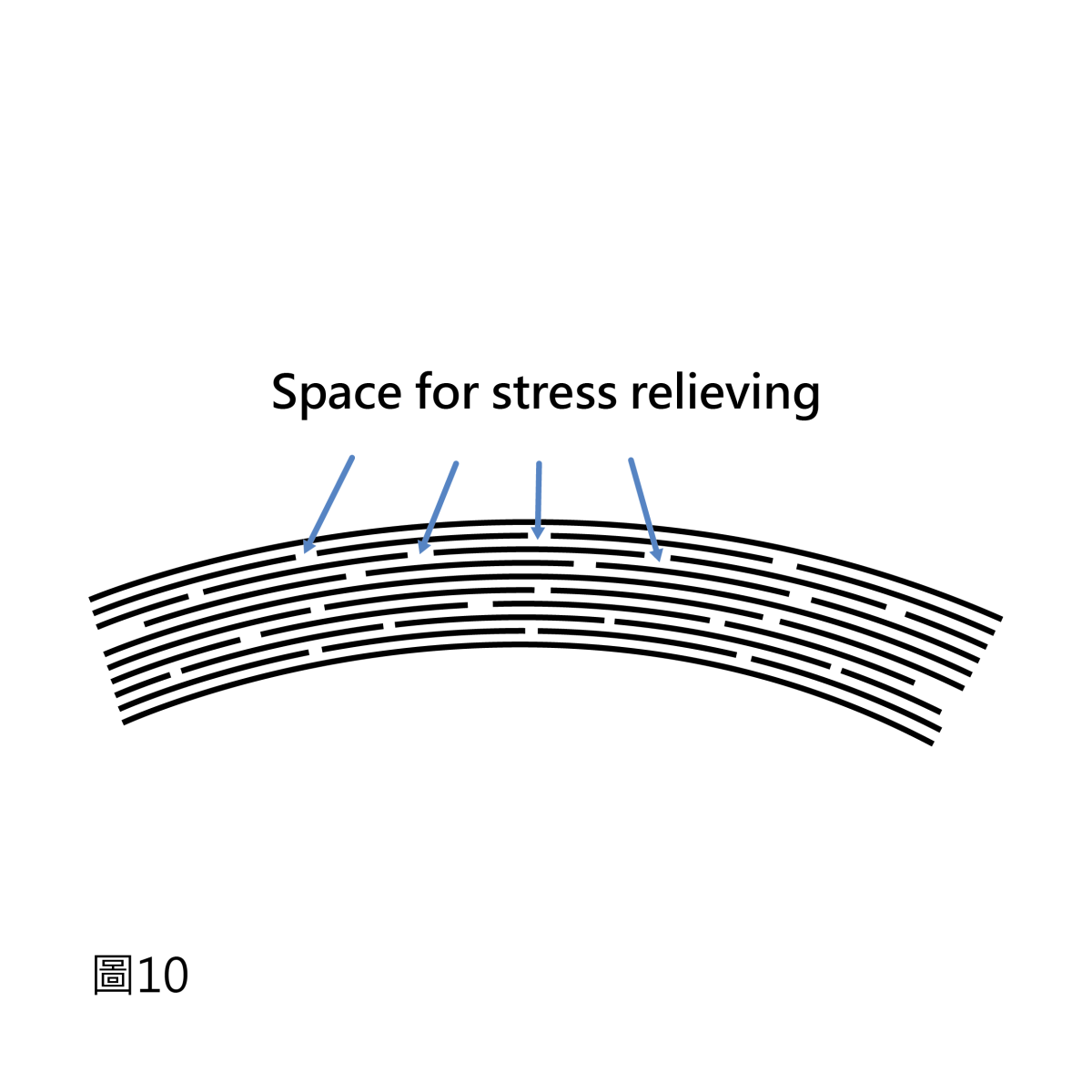
本設計最大的挑戰是電纜生命期。海底主電纜固定在海床上沒有彎折的問題,但聯結浮體的次電纜遭受海浪拍打容易彎折斷裂。目前最耐折的電纜生命期約一千萬次彎折,以海浪平均週期 5 至 12 秒計算,其生命期預估在 1.5 至 3 年間。
雖然電纜可以在海面拆換,但會造成維護成本及不便。建議一個摻入修補線的電纜設計[圖10]:修補線片段在電線編織時有序摻入,同時埋下應力舒解空間;當電纜受彎折時,這些線段產生平移舒解應力,同時也可以跳接斷線。